Battery
Equipment and machinery work when these are powered by energizing signals either from electrical sources or batteries. Batteries play a key role in making the equipment and machinery portable and useful in multiple applications. Batteries are mainly of two types;
Lead Acid Batteries
These are used in vehicles and several industrial types of machinery. These are high current carrying batteries and maintenance of such batteries takes up a good amount of time and resources.
Dry Cell Batteries
Such batteries are mostly used in the domestic market and several types of equipment are used in our homes like a torch, calculator, mobile instrument, laptop, etc. As compared to lead-acid batteries, such batteries are relatively maintenance-free. Depending upon the usage, there are several variations in this category. Some dry cell batteries are Zinc Carbon, Zinc Chloride, Alkaline Manganese, Nickel Cadmium, Nickel-metal hydride, Lithium-ion, and primary button cells for the hearing aid, pacemaker, radio pagers, electronic watches, calculators, etc.
The costs and rating of the battery depend upon its usage. For example, the Lynxmotion 6.0vdc Ni-MH 2800mAh battery pack[1] made from five high capacity Sub-C cells and 18 gauge multi-conductor wire costs approximately £24. The sleek size of the battery makes it suitable enough for packing it inside the robot so that the robot doesn’t get unduly burdened. With a weight of just about 9.34oz, it doesn’t prove to be too much of a burden on the robot and allows freer movements.
Compass
Navigation of shipping vehicles on high seas, airplanes, long route buses, automatic machines – like robots, etc. requires a system through which the vehicles can travel in the right direction. Compass is one such instrument that helps in such navigations. It can detect directions in comparison with the earth’s magnetic poles.
The magnetized pointer turns towards the direction of the magnetic field of the earth. Earth acting as a giant bar magnet makes the task of compass comparatively easier.
As we enter into the electronics and IT era, while on the one hand the smaller size of a compass instrument has made it a handy instrument, on the other, its accuracy has also improved to a great extent. For example, the Honeywell HMC6343 is one such fully integrated compass module[1] that has the facility of tilt compensation as well. The pre-requisite for finding accurate direction from the erstwhile solid-state compass instruments was that these compasses be held flat, but the IC-based instruments prove to be far better under such conditions. It includes firmware for heading computation and calibration for magnetic distortions. This module is a combination of 3-axis magneto-resistive sensors and 3-axis MEMS accelerometers, support circuits, microprocessors, and the requisite algorithm. A robotic instrument can be programmed to accurately negotiate a route if the assistance of a compass can be provided to it. The route map can be fed to the robot and in case of a turn towards left or right, the signals from the compass will alert the robot, which will then adjust its movements accordingly.
GPS
The Global Position System is another technologically advanced feature used for tracking and navigational purposes. In this case, the satellites put into orbit by different countries help in locating the position and speed of a particular vessel or object. Three key components of GPS include[2]; satellites over the Earth; control and monitoring stations on Earth; and the GPS receivers owned by users (US Government, 2010). SiRF starⅢ high-performance GPS Chip Set is one such monitoring system, which is highly sensitive and can even track the navigating equipment at low signals[3]. GPS helps in informing the concerned parties about the exact location of the individual or vessel, during walking, boating, driving, flying, etc. Developed by the US Department of Defence (DoD), originally, GPS was developed to help the US defense forces in locating military vessels and defense equipment, but gradually its use spread to other civilian purposes as well. When we talk about the GPS, we are more concerned about the receiving system of the navigation arrangement.
Desired parameters are fed into the GPS receivers, which in turn start exchanging the signals between some of the concerned satellites orbiting the earth. The early days of GPS required a high power supply and huge instruments, but gradually the integrated circuit chips have started reducing the size of the GPS receiver. With small portable GPS receivers on hand, it is now possible to start tracking anywhere around the globe, without unduly worrying about the physical distances and other conditions. The ability of such GPS receivers to operate at temperatures ranging from -400C to +850C provides more mobility to the users. The SiRF starⅢ high-performance GPS Chip Set makes one of the highly sensitive tracking devices, with a sensitivity of -159 dBm. It’s time to first fix (TTFF) is quite fast at lower signal levels. In addition, this chipset has a built-in SuperCap and a built-in patch antenna while supporting the NMEA 0183 data protocol
Microcontroller
As the name itself a microcontroller is supposed to exert control over the micro functions of equipment, particularly in areas where it is almost impossible for human beings to exert accurate control. A small portion of current and signal is sent across to the microcontroller unit, which keeps comparing it with the standards set for the operation, and in case of any variation beyond the permissible limit, will act accordingly. On the one hand this helps in saving the equipment from damage while on the other hand it ensures that the equipment is able to perform the desired function all the time. The wide range of calculations and functions done by a microcontroller brings it into the category of a miniature computer. Microcontrollers can be found in a digital watch, our car, motorbike, the washing machine, microwave oven, a trawler, telephone, etc.
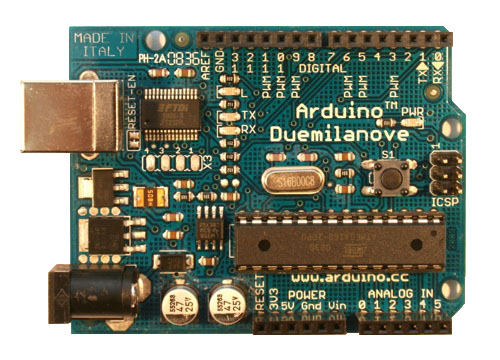
In fact with the growth of networking and tech-savvy appetite around us, most consumer appliances these days have a microcontroller inside them. For example, a robotic model designed to help a retail outlet in keeping the shop floor in order takes cues from a microcontroller inside. In addition, the microcontrollers can also help in aligning the functioning of the robot to that of any remote location or equipment. Such kind of networking often helps on the production floor while ordering the inventories etc. The programming part for microcontrollers is done with the help of programming languages and software coding. For example[1], the Arduino Duemilanove (“2009”) is a microcontroller board based on the ATmega168 (datasheet) or ATmega328 (datasheet). It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz crystal oscillator, a USB connection, a power jack, an ICSP header, and a reset button. It operates at 5 volts with a current of 40-50 mA (Arduino, 2010).
Motor Controller
A Motor controller can be similar to a microcontroller in some respects like it also controls the speed of an electric motor by taking feedback from the load side. While microcontroller has a multidimensional use,
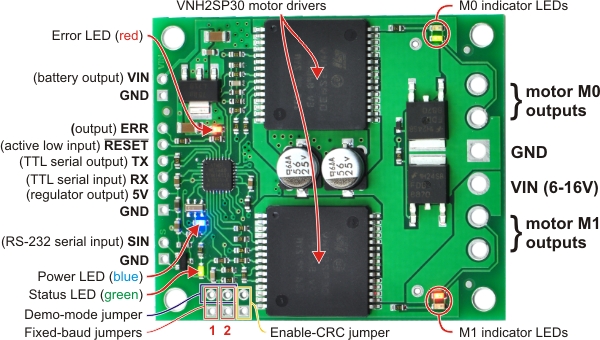
the motor controller is exclusively used for controlling the speed of motors. The motor controller helps in variable speed and direction control of the equipment attached with these motors. The controlling element could be manual or automatic, depending upon the usage and size of the motors. For example, if the motors are largely used in a big manufacturing plant, then the controllers can be manual. In this case, the controller will come out with some noise or siren and warn the person on duty that there’s some mismatch. The person on duty will accordingly make the changes in the motor speed or supplied current. But in the case of use in intelligent systems, the actuating and controlling task is done by the automated device itself. Pololu Qik 2s12v10 Dual Serial Motor Controller is one such motor controller chip that helps in maneuvering the speed and direction of two motors, thus proving to help control two different tasks simultaneously. It operates within a range of 6-16 V, with a current per channel up to 13A (30 A peak). Some of the advantages of using this chipset are (Pololu, 2010);
- HF PWM for eliminating switching-induced motor shaft hum or whine
- a robust, high-speed communication protocol with user-configurable error condition response
- LEDs for better troubleshooting
- reverse power protection
Motors
Electric motors have been around us in different sizes and shapes for quite a while now. A motor is a device that converts different forms of energy into mechanical energy, which in turn imparts motion to the equipment attached to the motor. The key components of a motor include armature or rotor, Commutator, Brushes, Axle, Field magnet, and power supply. For example, a robot is required to move from one place to another place, to turn back, to move its hands and head, etc.

All this requires motorized movements, and hence the use of motors. Dimension and operating current or voltages of a motor depending upon the purpose for which it is being used. For example a 12Vdc, 200RPM Gearhead Motor 90mA-1.5A motor will weigh around 150gms. Broadly, motors can be categorized into AC or DC motors, depending upon the operating voltage. Several motors work on AC as well as DC and are termed universal motors. Motors are further subdivided into servo, induction, synchronous, brushed or brushless, etc. The small dimensions of the Gearhead Motor make it further suitable for applications like robot design.
Range Sensors
These types of sensors are used for long-range or short-range distance sensing for adaptive cruise control, obstacle avoidance, and better efficiency. A robot will be able to avoid an obstacle if it can ‘see’ that object beforehand. In this case, the robot emits out some signals in the form of infra-red rays (IR) which come back to the programmable microcontroller of the robot after striking the object. The microcontroller then sends out appropriate signals so that the robot can adjust its speed and direction of movement accordingly. For example, the Sharp GP2D12 is an Analog distance sensor using uses infrared to detect an object between 10 cm and 80 cm away. This sensor has high immunity to ambient light and the color of the object.
References
Arduino (2010). Arduino Duemilanove. Web.
GlobalSat (2010). EM-406 GPS RECEIVER ENGINE BOARD-PRODUCT GUIDE. Web.
Honeywell (2010). 3-Axis Compass with Algorithms HMC6343. Web.
Pololu (2010). Pololu Qik 2s12v10 Dual Serial Motor Controller. Web.
US Government (2010). Global Positioning System – Serving the World. Web.